Massikeskus
Ühtlase sfääri / ketta massikeskus asub selle sfääri / ketta keskel (see võib tunduda triviaalne, kuid see kehtib ainult juhtudel, kui massijaotus on sfääriliselt sümmeetriline) Massikeskust võib vaadelda kui kogu keha kollektiivset esindatust ühe punkti abil (pange tähele, et see pole rangelt tõsi, kuid meie eesmärkidel aitab see luua mõningaid põhilisi intuitsioone). Samamoodi on ühtlase kuubiku / ruudukujulise plaadi massikeskus kuubi / ruudukujulise plaadi keskel.
Gravitatsiooniline potentsiaalne energia
Objekti gravitatsioonilise potentsiaalse energia annab
$$ U = mg (h _ {\ text {COM}}) \ silt {1} $$
kus $ m $ on kere mass, $ g $ on gravitatsioonikiirendus ja $ h _ {\ text {COM}} $ on massikeskme kõrgus. Võrrandis $ (1) $ oleme eeldanud, et potentsiaalseks energiaks on maapinnal $ 0 $ st $ h _ {\ text {COM}} = 0 $ . Nüüd tõstke keha nii, et selle massikeskus liiguks kõrguse $ h_1 $ kõrgusele $ h_2 $ , peame tegema mõnda tööd, mis on võrdne keha potentsiaalse energia muutusega:
$$ W = \ Delta U = mg (h_2-h_1) $$
Veerev ruut
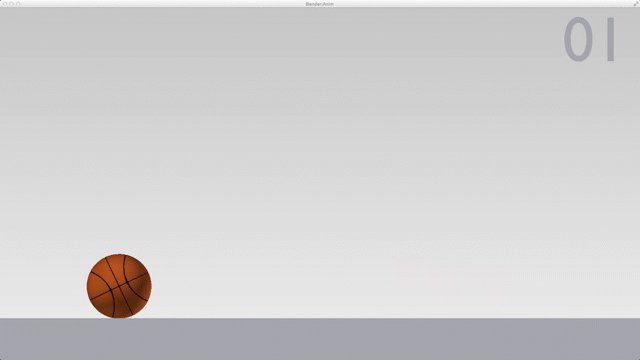
Nagu näete allolevast GIF-ist, on veereval ruudul omamoodi ebakindel pöörlev liikumine. Ebakindel selles mõttes, et selle massikeskus tõuseb üles ja alla, läheb üles ja alla ning on edasi.

Animatsiooniallikas
Nii nagu ülalpool arvutasime, peame ruudu massikeskme kõrguse tõstmiseks pisut tööd tegema (seal on kindel nurk, $ 45 ^ {\ circ} $ span> sel juhul kuni selleni peate ruudu pöörama, kui soovite, et see veereks. Kui pöörate ruudu sellest väiksema nurga all, langeb ruut tagasi). Ja kui massikeskus jõuab maksimaalse kõrguseni, langeb see siis ise teisele poole ja ruudu kukkumisel saadud kineetiline energia hajub heli- ja soojusenergiana ruudu kokkupõrke elastsuse tõttu maapind. Nüüd peaksite uuesti veerema panema ruudu massikeskme ülespoole. See protsess hõlmab pidevalt energia andmist massikeskme tõstmiseks ja seejärel energia kaotamist ruudu maapinnale langemise tõttu. Ja see muudab ruudu veeremise tõesti keeruliseks.
Miks läbib see elastseid kokkupõrkeid?
Ruut on altpoolt ringikujulise kettaga elastsemate kokkupõrgete tõttu altid kaotama rohkem energiat, kuna pinnaga puutub kokku suurem pind. See sarnaneb jalgratta rehvi juhtumiga. Kui rehv on täis pumbatud, on see sfääriline ja seetõttu on madalam kokkupuude maapinnaga, mille tulemuseks on väiksem energiakaotus, samas kui tühjenenud rehvil on maapinnaga kokkupuutes suurem pind, mis muudab selle elastsemateks kokkupõrgeteks kergemaks. p>
Veerev ring
Kui ring / kera veereb, jääb massikeskme kõrgus kogu liikumise ajal kuju sümmeetria tõttu samaks. Seda näete ka allpool olevast GIF-ist.
Animatsiooniallikas
See tähendab, et ükski meie pakutav energia ei lähe massikeskme kõrguse muutmisel raisku. Ja kogu energia kasutatakse sfääri / ringi kiirendamiseks, mis muudab meid kergemaks selle kiiremaks veeremiseks.
Miks jääb selle massikeskus samale kõrgusele?
Tõestame ranguse huvides, et ring on ainus 2D kuju, millel on omadus, et selle massikeskus jääb veeremisel samale kõrgusele. Oletame kõigepealt, et eksisteerib veel üks kuju (mitte ring), millel on ka see omadus. See tähendab, et ükskõik, kuidas te selle kuju maapinnale panete (muidugi ei saa me seda lihtsalt lamedaks panna), jääb massikese alati püsivale kõrgusele. Mis tähendab, et maa ja massikeskme vaheline kaugus on alati sama. Mis siis tähendab, et maad puudutava piiripunkti ja massikeskme vaheline kaugus on alati sama. See kehtib aga kõigi piiripunktide kohta, kuna kõiki piiripunkte saab panna maad puudutama (eeldame jällegi kumerat kuju). See tähendab, et kõik piiripunktid asuvad massikeskmest samal kaugusel. See tähendab, et piiripunktid asuvad ringil, mis on koondunud keha massi keskmesse. Ja seega ei saa soovitud kuju olla midagi muud kui ümmargune ketas.
Inertsimoment
Inertsimomendil on siin ka oma roll. Võib näidata, et ükskõik millise 2D kujuga konstantse ala korral oleks ümmargusel kettal madalaim inertsimoment (eeldades, et kõik kujundid tehakse samadest materjalidest / tihedus). See tähendab, et ümmarguse ketta veeretamine oleks mõnevõrra lihtsam kui mis tahes muu 2D kuju. Sarnane argument kehtib ka 3D-kujundite kohta, kuid siin hoiaksime kuju (ala 3D-analoog) kuju muutmise ajal konstantsena. Kuid siin on teoreetiliselt kõige väiksem inertsimoment lõpmatult väikese raadiusega ja lõpmata suure pikkusega silindril.
Lisa
Spetsiaalsete pindade jaoks võite panna ruudu pöörlema nagu kera. Vaadake allpool olevat GIF-i.
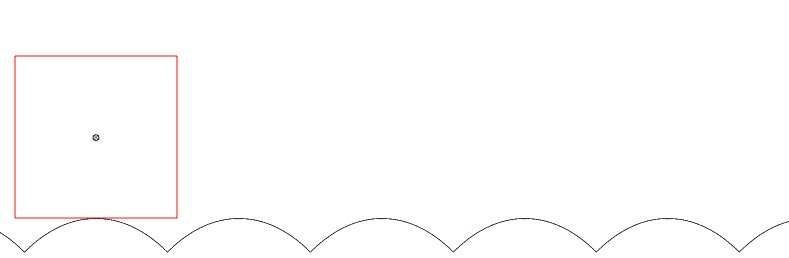
Animatsiooniallikas
Nagu näete, kui kasutame pinda, mis koosneb tagurpidi pööratud kontaktvõrgu kõveratest, saame teha isegi ruudukujulise rulli.Miks see tõsi on, saate vaadata tuletamist siit.
Nagu see vastus soovitas, on ka konstantse laiusega kõverad veeretamisel head kandidaadid.Nii et rangelt öeldes pole ring ainus kuju, mis võib tasasel pinnal veereda.Kuid see on veeremise osas ruutu parem.